Research
Our mission is to develop theoretical foundations and practical algorithms for human-interactive robotics. Our group focuses on enabling robots to learn from and collaborate with humans in real-world environments. We leverage tools from machine learning, control theory, and human-robot interaction to build intelligent, adaptive, and safe robotic systems.
Interactive Reinforcement Learning
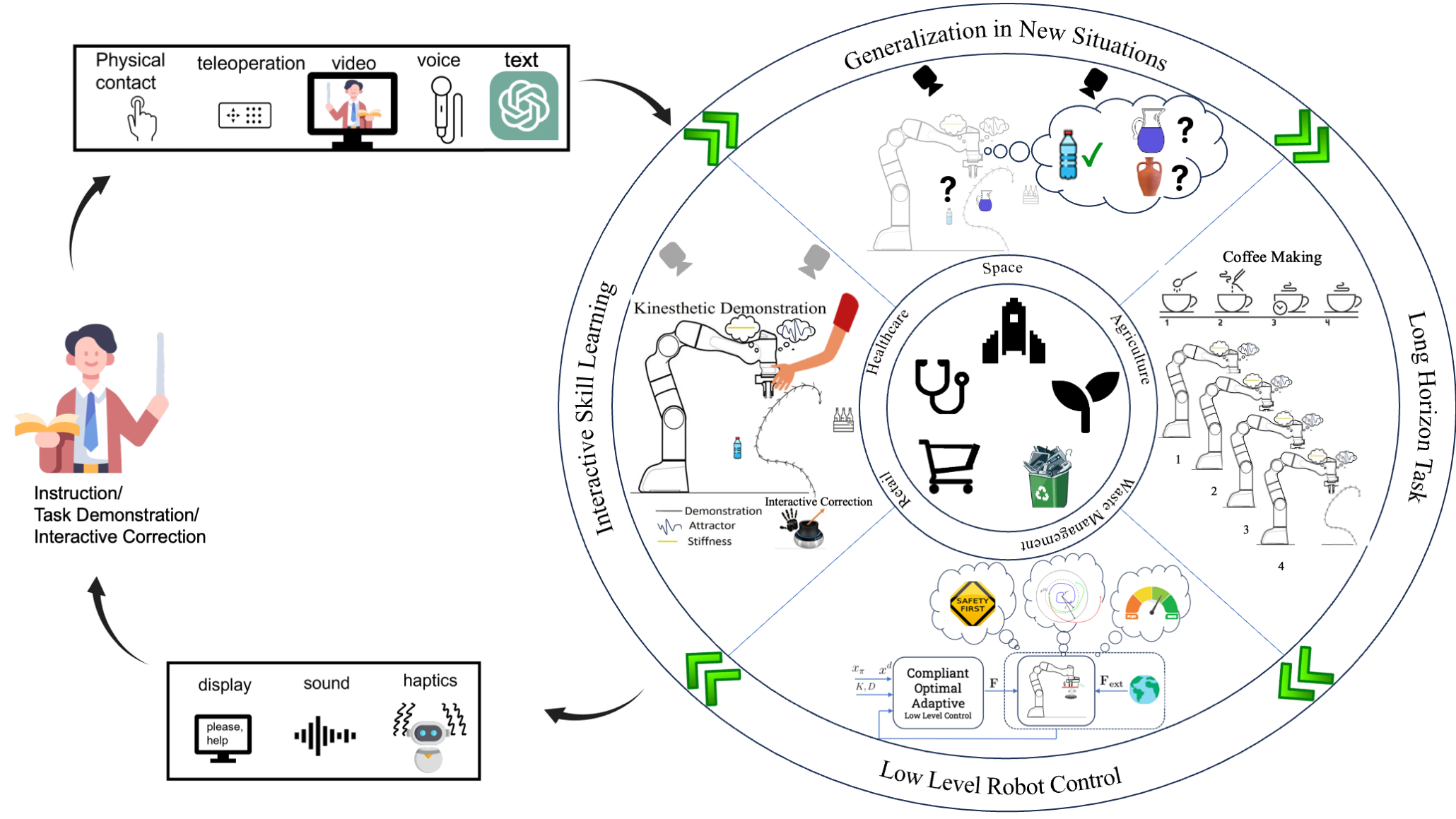
We develop methods for robots to learn complex tasks through interactive feedback from humans. Our work focuses on efficient learning from human corrections, incorporating human preferences, and enabling robots to actively query humans for guidance during learning and execution.

Foundational Models for Robotics
We explore how large-scale pre-trained models can be leveraged for robotic manipulation and navigation. Our research includes vision-language models for task understanding, diffusion models for motion generation, and adapting foundation models to physical robot systems with limited data.

Safe and Compliant Human-Robot Interaction
Safety and compliance are essential when robots work alongside humans. We develop adaptive control strategies, variable impedance methods, and formal verification techniques to ensure safe physical interaction. Our research ensures robots can adapt their behavior based on human intent and environmental constraints.

3D Reconstruction, SLAM and World Models
We develop methods for robots to build accurate 3D models of their environment through active perception. Our work includes SLAM (Simultaneous Localization and Mapping), real-time scene reconstruction, world models for spatial understanding, object-level mapping, and integration with manipulation planning to enable robots to operate effectively in complex, unstructured spaces.

Optimization and Optimal Control
We develop optimization-based approaches for robot motion planning and control. Our research includes adaptive optimal control for uncertain systems, trajectory optimization under constraints, and hierarchical planning frameworks that combine learning with classical optimization methods.